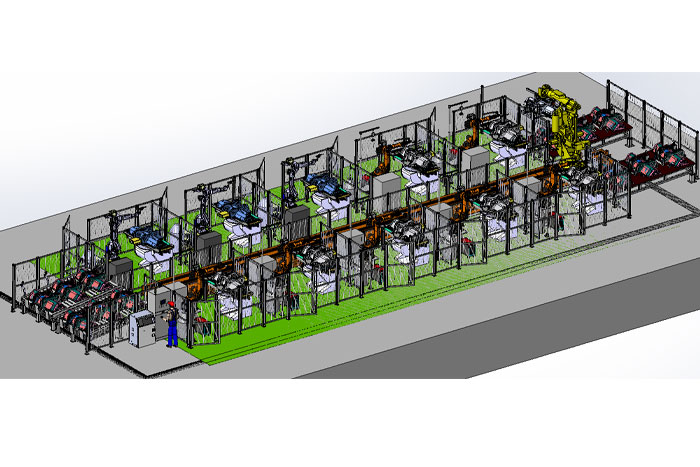
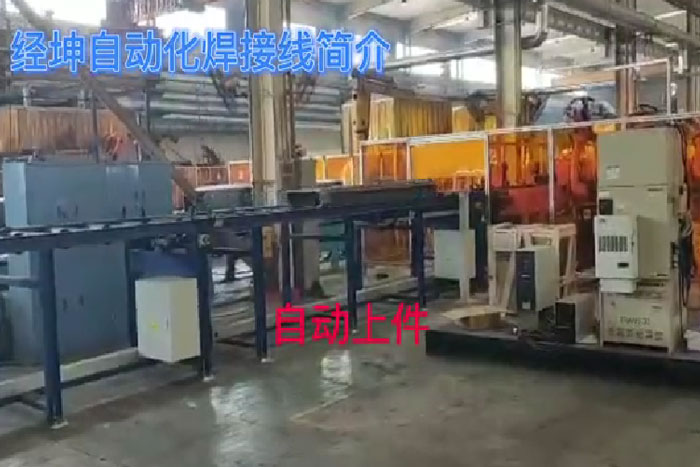
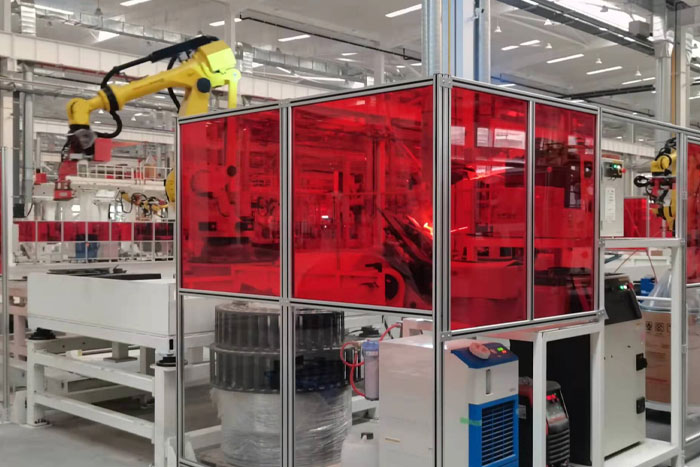
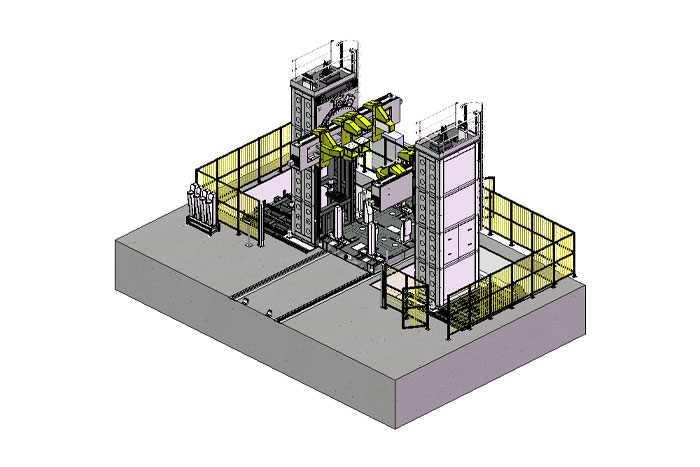
人工打底完成后使用 KBK 放置在上料臺上→上料臺通過傳感器識別機(jī)型→PLC 控制搬運(yùn)機(jī)器人抓取工件并放置至空閑焊接機(jī)器人工位→自動裝夾、焊接→焊接完成搬運(yùn)機(jī)械手下件至下料臺緩存整個生產(chǎn)過程可實(shí)現(xiàn)來料自動定位、物料種類識別、零件自動上下料、自動焊接及轉(zhuǎn)運(yùn)等。項(xiàng)目于2023年6月12日驗(yàn)收。